インフラ検査用H型クローラクライマーの開発
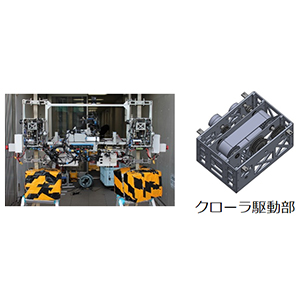
本研究室では、宇宙エレベーター用クライマー技術を応用し、新規インフラ検査システムを構築するための自走式昇降機の開発を行っている。本研究で想定する検査方法では、検査平面に対し平行に2本のベルトを設置し、機械的に結合された2機のクライマーの間に様々な検査や補修用のユニットを搭載する。また、重量物の運搬なども想定し、鉄塔などでの補修作業での使用も可能とする。
対象にしている検査方法では、2機のクライマーが同期して昇降を行う必要がある。そのため本研究では、検査ユニットを搭載した状態で安定した上昇を行うために駆動方式の比較を行っている。そしてローラ駆動方式よりもクローラ駆動方式の方が大きな負荷に対しても安定して昇降することを確認し、それを採用している。
最終的に2機の機体を機械的に結合した昇降機を開発し、最適位置同期化制御を用いて、上昇実験による有効性の検証を行っている。
リアクションホイール機構を用いた宇宙エレベータークライマーの姿勢制御

本研究室では宇宙エレベータークライマーの機構について研究を行ってきている。宇宙と地上を結ぶテザーとしては、地上付近では風などの環境の影響を受けにくいロープテザーが有利とされている。しかし、ロープテザーは風などの影響によりテザー周りに回転してしまう問題点がある。
本研究室では、これに対処して姿勢制御を行うために、CMG(Control Moment Gyro)ユニットの開発なども行ってきているが、本研究では制御が比較的容易かつ小型、軽量で連続的に長時間の姿勢制御を可能とするリアクションホイール機構を用いた姿勢制御ユニットの開発を行っている。リアクションホイール機構とはホイールにトルクを加えることで発生する反トルクによってクライマーの姿勢制御を行う機構である。リアクションホイール機構で有効に姿勢制御が行えることは確認してきているが、リアクションホイール機構は、同じ方向に外乱を受け続けたときに飽和してしまい制御不能になるため、姿勢制御と飽和復帰の2つの動作を実現できる機構を検討している。
屋内昇降試験機の開発

宇宙エレベータは、ロケットに代わる輸送手段として構想されているものである。地球の自転速度とほぼ同速の公転軌道である静止軌道上の宇宙エレベータからテザーを地表付近まで伸ばし、テザー上を走行するクライマーによって宇宙との間を結ぶ。現在、江上研究室ではクライマーの基礎的な研究開発を行っている。
現在、江上研究室では校舎壁面を使った試走路を有している。しかし、距離は25mと短く、天候によって実験の実施が左右される。そこで試験環境の整備の一環として2009年度より、屋内試験機の開発を行っている。
屋内試験装置は、環状のベルトテザーをモータで駆動する。クライマーの位置をレーザーセンサで読み取り、クライマーの速度に合わせてベルトの回転速度を制御している。またベルトの張力についてもテンションセンサーにより自動調整可能である。
通常使用する写真のような据え置き型以外にも、展示や特殊環境での試験が行える移動組み立てが可能なタイプも製作している。
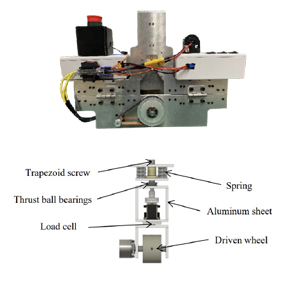
自動押付力調整機構を搭載したベルトクライマーの開発

本研究室では宇宙エレベータークライマーの機構について長年研究してきている。宇宙と地上を結ぶテザーとしては、宇宙空間ではスペースデブリなどの影響で破損しても修復可能なベルトテザー、地上付近では風などの環境の影響を受けにくいロープテザーが有利とされている。
本研究では、このうちベルトテザーに対して自動押付力調整機構を搭載したクライマーの開発を行っている。これはテザーをローラで挟み込んで摩擦力により昇降する構造を想定し、その挟み込む力つまりテザーへの押付力を調整して、自動で適切な押付力に制御するクライマーの開発及び研究である。ベルト押付力調整クライマーについては、数年前からいろいろな機構で試みてきているが、ほとんどは競技会(SPEC)用に製作してきており、基本特性の検証や制御などの理論検討はほとんど行われてきていなかった。
ローラの押付力が大きいとき、すべりを抑えることができる反面、クライマーを駆動させるモータの負荷は増大する。反対に、ローラの押付力が小さいとき、モータの負荷を減らすことはできるが、すべりが大きく発生する。すべりについてはローラが削れる可能性が高くなり、万が一の場合落下の危険もある。負荷については、バッテリーの持続時間とも密接に関係する。本研究では、すべりや電費という効率を考慮して、クライマーの始動時と定常時など駆動状態に合わせて、最適な押付力を自動的に実現するためのクライマーの機構や制御の有用性について理論的な面から検討している。
自動押付力調整機構を搭載したロープクライマーの開発
本研究室では宇宙エレベータークライマーの機構について長年研究してきている。宇宙と地上を結ぶテザーとしては、宇宙空間ではスペースでブリなどの影響で破損しても修復可能なベルトテザー、地上付近では風などの環境の影響を受けにくいロープテザーが有利とされている。
本研究では、このうちロープテザーに対して自動押付力調整機構を搭載したクライマーの開発を行っている。ロープテザーをローラで挟み込んで摩擦力により昇降する構造を想定し、テザーへの押付力を調整して、自動で適切な押付力に制御するものである。
ロープテザーはベルトテザーと異なり、押し付けの強さによって、テザーの断面形状が円形から楕円形に変化し、ローラとの接触面積が大きく変化する。ローラの押付力が大きいとき、すべりを抑えることができる反面、クライマーを駆動させるモータの負荷は増大する。反対に、ローラの押付力が小さいとき、モータの負荷を減らすことはできるが、すべりが大きく発生するという特性はベルトテザーと同じであるが、すべりによるローラの削れの影響はベルトテザーより大きく、その特性はより複雑であると考えられる。宇宙エレベーターのテザーとしては競技会などではベルトテザーが一般的であり、ロープテザーはあまり使用されていない。さらにロープテザーの押付力調整についての研究はまだ行われていないと考えられる。このため本研究では、基本特性の検証を行い、すべりや電費という効率を考慮して最適な押付力を自動的に実現するための機構や制御の有用性について理論的な面から検討している。
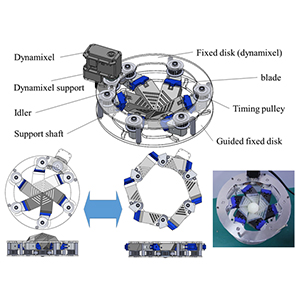
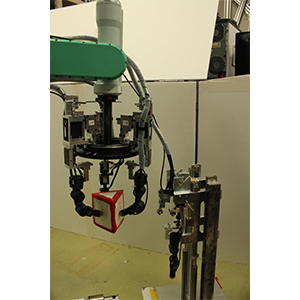
アイリス多指ロボットハンドの開発

本研究室では、ロボットハンドの機構を単純化しつつ,少ないアクチュエータで対象物の仕様や形状に広く対応できるロボットハンドとして,カメラレンズ絞り機構などに用いられるアイリス機構を応用したロボットハンドの提案を行ってきている。このロボットハンドは一つのアクチュエータで駆動し、対象物をその全周囲から同心円状に正多角形の形状を保持して多点で包み込み把持することができる。しかし、対象物を把持する部分(ブレード)はロボットハンドの機構内部にあり、機体の外面を構成する中空円板の中空部内に入る大きさの対象物しか把持できない。また、中空円板の厚みより小さい対象物も把持できないという問題点が見られた。
本研究で提案するアイリス多指ロボットハンドは、揺動機構を用いたアイリスロボットハンドのブレードを機構外部に配置し、ブレードの先端部分にロボットハンド本体を構成する円板に対して垂直方向に伸ばした指を取り付ける新機構を有したものである。ブレードを機構外部に配置し、機構内部のギア比を調節することにより把持トルクと把持速度の調整が可能となる。さらにブレードの指はシリコ-ン素材にし、対象物の把持の安定化を図っている。このため、垂直方向に延長された指により,短小な対象物を摘むような把持が可能となっている。また、ブレードの先端のみに指を取り付けたことで、ブレード展開時に各指間には調節可能な隙間ができ、横置きの長方形対象物の把持が可能となっている。
円錐型アイリスロボットハンドの開発
本研究室ではアイリス機構を応用したロボットハンドを開発してきている。アイリス機構ロボットハンドは、単一アクチュエータで駆動可能、機構が単純、複数の対象物を同時に把持可能といった特徴を持つ。しかし、従来研究では把持時に機体の開口部内に対象物を挿入する必要があり、小型や扁平な対象物の把持が困難であった。また、ロボットハンドの指に該当するブレードは柔軟性を欠き、点接触による把持が多いため複雑な形状をした対象物の把持も困難であった。
そこで本研究では、小型や扁平な対象物に対応するため、閉じた際に突出した形状となる円錐型アイリス機構ロボットハンドを提案する。さらに、複雑な形状の対象物に対応するため、ブレード先端に対象物の形状にフィットするフィングリップを用い、把持実験からその有効性を検証している。
側面開閉機構を有するアイリスロボットハンドの開発
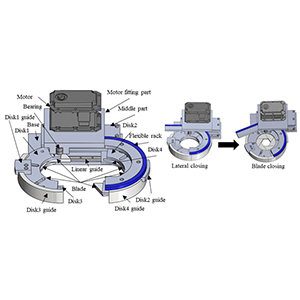
本研究室では、アイリスロボットハンドを提案してきている。これはカメラの絞り機構に使用されている機構をブレードの重なりがないようにして取り入れたロボットハンドエンドエフェクタである。単一のアクチュエータで全周囲多点把持を実現でき、対象物の断面の大小によらず同一の機構で把持が可能となるなどの特徴を持つ。しかしこの機構のままでは、本体側面からの把持が不可能であり、長い対象物の把持の困難さや、このロボットハンドを使用するロボットアームの把持動作の複雑化といった問題があった。
そこで本研究では、直動運動により側面開閉をし、本体側面からの対象物の挿入と、全周囲把持を両立できる新機構アイリスハンドを提案している。このロボットハンドは側面開口状態から動作し、側面閉口状態、そしてブレード絞り状態という3つの状態を経て対象物の全周囲把持を行うことができる。
アイリスロボットハンドの開発

本研究室では、カメラレンズ絞りなどに用いられているアイリス機構を応用したアイリスロボットハンドを提案している。アイリス機構は全周囲からの開閉が可能な優れた特性を持つが、ブレードが薄く重なっているためこのままではロボットハンドとして用いることはできない。このためブレードに厚みを持たせて重ならないようにし、この機構をロボットハンドに用いている。この機構を用いたロボットハンドは、単純な機構で構成され、単一のアクチュエータで駆動が可能である。また全周囲から包み込むような把持が可能になるため、対象物の大きさや形状の変化に対応でき、精密な位置決めが不要などの特徴をもつ。また安価に製造や運用が可能で解析も容易などの特徴をもつ。
本研究では摺動型と揺動型という異なった機構をもつアイリスロボットハンドを提案し、開発したロボットハンドの解析を行い、その特性と有効性の検証を行っている。また、アイリスハンドをエンドエフェクタとして用いるため、アイリスハンドの特性を活かせるような水平多関節ロボットアームも開発している。このようなアイリス機構を応用したロボットハンドの研究は当研究室オリジナルなものである。
体動による旋回機能を持つ倒立振子型電動車いすの開発
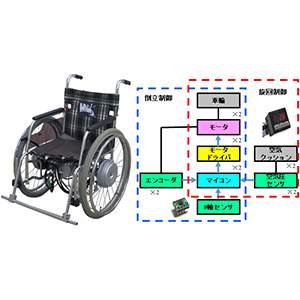
高齢者や障がい者だけでなく健常者でもショッピングモールや展示場など広い場所を移動する際や体調がすぐれないときなどには、座りながら移動できる電動車いすを使いたいと思うことも多い。
本研究室では搭乗者の直感的な体の重心の移動により前進・後退・旋回の操作を行うことができる倒立振子型の電動車いすの開発をしてきている。倒立振子型にすることにより、慣れは必要であるものの、俊敏できめ細かい動きが体動によりイメージ通りに実現できる。
本研究では体動により前後および旋回操作可能な電動車いすを実現する。既存の電動車いすの主車輪軸を車両の重心上部に移動し、前輪の補助輪を取り外すことにより倒立振子型にし、姿勢センサを用いて体動による前進・後退動作を行う。さらに座席部の左右に設置された空気クッションと空気圧センサを用いて左右の空気圧差から重心の偏りを検出するセンサを開発し(特許取得済み)、本センサから得られる空気圧差を用いてハンズフリーの左右旋回動作を実現する。この際、横傾斜路面に対して谷側に流れてしまう片流れに対して、左右の空気圧差に対して不感帯を変化させることで、水平面の走行と同様の操作性を実現する手法を提案している。
また前輪補助輪を取り外したシステムでは、大きな径の主車輪のみで走行するため50mm程度までの段差乗り越えも可能となる。開発した倒立振子型電動車いすに対して外乱オブザーバを用いた制御系を組み込むことにより、搭乗者の体重の変化に対応が可能で、安定した走行を実現している。
電動車いすの体動による進行方向指示装置の開発

本研究室では、体動で操作可能な倒立振子型の電動車いすを開発してきている。倒立振子型の電動車いすは、既存の電動車いすをベースとして,前輪の補助輪を取り外し,主車輪軸を車体の重心上部に移動させて倒立振子型にしたものである。動作としては,機体の姿勢の変化により前進・後退を行い、車いすの座面部の左右に設置された空気クッションの空気圧差を利用してハンズフリーの旋回を実現している。このため、俊敏な動作が可能で操作性は良好であったが、2輪であるため車いす搭乗者の慣れが必要という問題点があった。
本研究では、これらの問題を解決するため,通常使われている電動車いすを対象とし、倒立振子型の電動車いすで用いていた空気クッションを用いて、車いす搭乗者の重心移動のみで前進・後退・旋回の操作を行うための進行方向指示装置の開発を行っている。空気クッションは体圧分布を調べることにより、前と左右及び後ろの4つの空気クッションから構成している。本装置を用いるとジョイスティックを使うことなく体動での操作が可能となっており、軽作業を行いながらの移動も可能になっている。本装置は既存の電動車いすにも容易に外付け可能で、現在使われている電動車いすへの適用も期待できる。
車いすの段差乗り越え補助機構の開発
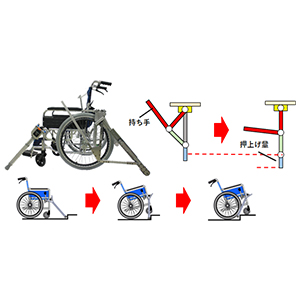
車いすでの移動には制限があり、段差に差し掛かった場合、車いす使用者が自力で乗り越えを行うのは難しく、介助者の補助を必要とすることが多い。
本研究室では、介助者の補助が無くても段差を乗り越えることができる補助機構の開発を目的とし、手動車いすに対して段差乗り越え補助機構の開発を行っている。補助機構の開発を行うにあたってモータ、マイコンなどを一切使わず、メカニズムだけで問題を解決するというコンセプトのもと、車いす使用者の運動能力を活かした松葉杖型補助機構と、倍力型補助機構を併せた段差乗り越え補助機構の提案を行っている。
松葉杖型補助機構を用いた段差乗り越えの動作としては、段差に差し掛かった際にこの補助機構を段差に押し当てて支え棒とすることで前輪を持ち上げて乗り越える。松葉杖型補助機構はシンプルな機構で容易に前輪を持ち上げることができるが、後輪の持ち上げの補助はされないため、100mmより高い段差となると後輪の乗り上げが難しいことが実験で確かめられている。そこで後輪の段差乗り越え補助用に開発したのが倍力型補助機構である。倍力型補助機構とはいわゆる「てこの原理」を利用したもので、力点でのモーメントと作用点のモーメントが等しいことを利用し、作用点と支点の間を短くすることによって力点に加えた力よりも大きな力を作用点に与え、その力を後輪の持ち上げの補助に利用したものである。
ボール&プレート経路制御装置の開発

本研究室では,自動運転車両や工作機械で重要になる経路制御について、独自の経路制御手法を提案している。そして、これらを視覚的に表現することを目的としボール&プレート装置を開発し、独自の経路制御手法を組み込んで高い経路追従性能を達成している。一般にこのような制御に経路制御手法を組み込んでいるものはほとんど他には見られない。
開発したボール&プレート装置は420×400×520mmの大きさで19型のディスプレイとタッチパネルからなるプレートに対して、4本の垂直に搭載されたリニアDCブラシレスモータ(LDM) が位置同期制御され、傾斜が与えられる。LDMは機械的損失が少なく、高い応答が得られるのが特徴である。プレートはフレキシブルジョイントにより、重心周りの慣性モーメントが釣り合っており、 LDMとマグネットジョイントによって接合することで、大きな回転角度を得られるとともに過大な入力が入った場合には接合部が分離されるようになっている。ボールの位置情報は、プレート部に搭載されている赤外線式のタッチパネルによって検出されている。
上部プレート部の経路制御系でプレート目標角度を生成し、下部リニアモータは位置同期しながらその角度に追従させることで制御を行っている。人間がプレートを動かしてボールの軌跡を制御する場合には到底不可能な高い経路制御性能を実現している。
連結式リニアモータ制御
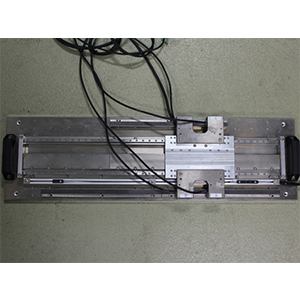
リニアモータは、電気エネルギーを直接直動運動エネルギーに変換できる機構の総称である。回転モータを切り開いて直線的に展開したものと理解できる。したがってリニア直流モータ、リニア誘導モータ、リニアブラシレスモータなどの種類がある。
リニアモータは高い加減速力が得られ、高速高精度な用途に適している。したがって、生産現場において高速高精度な搬送精度が要求される工程を中心に、リニアモータによる搬送装置が普及してきている。一方、従来のリニアモータはガイドおよび可動子を予め決まった寸法で設計・製造していた。このため製造工程が変更となると、リニアモータの再利用は困難であった。
そこでリニアガイド側を連結式することにより、複数の規格化されたガイドを連結することで柔軟な搬送システムを構築することができる考えられる。しかし、連結時にガイド間のギャップが発生するなどの問題が生じることが予想できる。
本研究では、連結式リニアモータを想定し、想定しうる問題点を洗い出したうえで、高精度な繰り返し位置決め制御を開発することを目的としている。
※本研究は、日本トムソン様との共同研究となっています。日本トムソン様からリニアモータ式の提供を受けております。
弾性アクチュエータを用いた4脚ロボットの足探り歩行
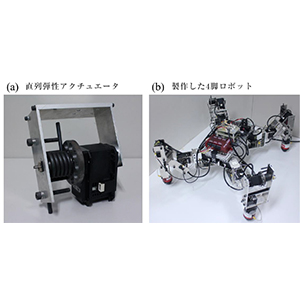
被災地などの復旧作業では2次災害などの危険かつ重労働を要するためロボット化が図られ、走破性の高い脚ロボットが注目されている。さらに、がれき、落下物、救助の人的接触のため、機構的に柔らかい脚ロボットが必要と考えられる。
本研究では、脆弱環境下において足先の力分散を行い安定した歩行を行う直列男性アクチュエータを用いた4脚ロボットの開発を目的として研究を行っている。そのため各関節にばねを使用した機構的に柔らかいロボットを開発する。このロボットはばねを使用し、ばねのたわみを計測することにより足先の抗力を推定することができる。これにより力覚センサを用いず足先力の制御が可能となり、力分散を行い安定した歩行を行うことができる。
トーションばねを12関節すべてに用いて、脆弱環境下を想定した足探り歩行の実験を行うため、推定結果と足先に搭載した6軸力覚センサの値の比較を行い、足先の抗力の推定が可能であることの検証を行っている。
形態可変型ロボットハンドシステムの開発
ロボットハンドで様々な作業を行うには多指多関節ロボットハンドが適している。一般に単純な作業の場合には2本指のグリッパ型が、複雑な作業や汎用性を重視する場合になると3本指3関節ハンドが用いられることが多い。さらに最近ではヒューマノイド型ロボットなどには人間型ハンドである4本、5本指ハンドが用いられている。ヒューマノイド型ハンドは人間の手に似せて作られたものであり、人間が行う作業をそのまま行うことが要求されている。しかし、実際にはアクチュエータの自由度や機構上の制約により実際の人間の手の作業には遙かに及ばないものになる。
これらのロボットハンドの共通した形態上の特徴をみると指の本数はそれぞれ2本~5本で固定されており、その指の付け根と掌の結合部は固定されていることが一般的である。このためこれらのハンドの中で一番汎用性が高いと考えられるヒューマノイド型ハンドにしても作業内容はその形態による制約を受ける。
このため指の本数とその付け根の制約を緩和したロボットハンドはどのようになるかという発想で、形態可変型ロボットハンドシステムを提案している。このシステムは形態可変型ロボットハンドとそれを装着するロボットアーム、指の自動着脱に用いるスタンドから構成される。その主要要素である形態可変型ロボットハンドは各部をモジュール化することにより、「指の本数が可変」、「指の付け根の配置が可変」、「指以外のモジュールを装着可能」という特徴を備えたものである。
この形態可変型ロボットハンドは、自動的に指を着脱することで、指の本数を2本から6本まで変えることができる。ロボットハンドに設置されているCCDカメラで、対象物の形状や数などを画像処理により認識し、これらと作業内容を考慮して適切な指の本数と配置を決定する。指の本数が装着されている指の本数と異なれば自動的に適切な数に着脱した上で、指の付け根が適切な配置となるように指を移動する。通常の指では困難な特殊な作業の場合には、爪付の指など特殊な用途を持った指モジュールを装着して作業を行うことも可能である。これらの特徴によって把握対象物や作業内容に合わせた形態をとることができ、従来のロボットハンドに比べ汎用性の高い複雑な作業が容易となることが期待できる。
このロボットハンドは、様々な作業を行う場合や作業を限定した場合などのような形状のロボットハンドが適しているかというロボットハンドの研究を行うためのプラットホームともなり得る。例えば指がヒューマノイド型ハンドより多い6本あったら作業にどのような拡張性が見いだせるのかといったことを検討する材料にもなると考えられる。
セミアクティブショックアブソーバのインテリジェント制御

運動している物体がほかの物体に衝突すると急激なエネルギ変化により衝撃が生じる。この運動衝撃や衝撃音を緩和するための装置がショックアブソーバ(緩衝装置)である。その性能として求められるのは、ストローク全体にわたってできるだけ小さく一定の抵抗力を発揮しながら必要なエネルギ変換を果たすことである。
しかし、従来のショックアブソーバはあらかじめ衝突物の質量や衝突エネルギなど、細かい使用条件をもとに設計された受動的なものが一般的である。このためこれらの条件が変化した場合には対応できない。特に衝突物の質量が一定であれば、多少衝突エネルギが異なっても比較的安定した高い緩衝効率を得ることができるが,同じエネルギで衝突物の質量の異なる場合に高い緩衝効率を得るのは難しい。
本研究では、単孔式のオイル式ショックアブソーバにオリフィス面積を調整する調整軸を取り付け、調整軸をステッピングモータにより回転させる機構のセミアクティブショックアブソーバの試作を行っている。これは、ステッピングモータによりショックアブソーバ内のオリフィス面積を能動的に変化させ、オリフィスを通過するオイル流量を調整しながら緩衝特性を能動的に制御するものである。
小型で低コスト化を目指し、センサとしてロードセルのみを用い、ロードセルから得られる抗力値のみから衝突物の質量とエネルギの推定を行うインテリジェントシステムを提案している。そして抗力値の落下試験データのみから、ニューラルネットワークを用いて、自動的に衝突物の質量とエネルギの推定則を構築するシステムを開発している。次にこのシステムから得られる衝突条件の推定値を用い、条件に合ったオリフィス面積の制御を行うための制御則を構築している。
試作したショックアブソーバは使用するオイルが圧縮や温度特性変化を伴う非線形性をもつことから数学モデルの構築が困難であるため、制御方法としてファジィ推論法を用いる。その際、メンバシップ関数の形状の調整は実験や経験に依存して試行錯誤的に行うと実用面で問題となるため、ニューラルネットワークでの学習機能を用いたニューロ的ファジィを用いて自動的に行っている。